-
简介
-
追踪模式
-
ArUco 标记和基于标记的追踪功能
-
基于标记的追踪功能
-
-
基于标记的位置共享设置
-
LBE 模式/LBE 混合模式设置
-
LBE 地图配置
-
基于标记的防漂移设置
-
基于标记的高级重新定位设置
-
基于标记的场景对齐设置
-
VR 模拟器模式设置
-
其他服务
-
更多功能
使用 ArUco 标记对齐虚拟现实和锚点坐标系
使用 ArUco 标记对齐您 VR 模拟器的虚拟现实和锚点坐标系。
注:
-
必须设置基于标记的位置共享才能使用此功能。有关详细信息,请参见基于标记的位置共享设置。
-
请在操作 VR 模拟器之前测试 API,以确保坐标系按预期工作。
-
定义虚拟现实和锚点坐标系的偏移量。
在对齐虚拟现实和锚点坐标系之前,必须先定义偏移量。请使用字符串键 ClearRecenterXform 来定义偏移量:
操控手柄 string key = "ClearRecenterXform"; Interop.WVR_SetParameters (WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key)); Interop.WVR_SetParameters (WVR_DeviceType.WVR_DeviceType_Controller_Right, Marshal.StringToHGlobalAnsi(key)); Interop.WVR_SetParameters (WVR_DeviceType.WVR_DeviceType_Controller_Left, Marshal.StringToHGlobalAnsi(key));
腕带式追踪器 string key = "ClearRecenterXform"; Interop.WVR_SetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key)); key = "ClearRecenterXformTR"; Interop.WVR_SetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key));
-
配置用于对齐虚拟现实和锚点坐标系的字符串键。
字符串键 PLAYER01InCarOrg 用于对齐虚拟现实和锚点坐标系。请使用您的 ArUco 标记的参数配置此字符串键。
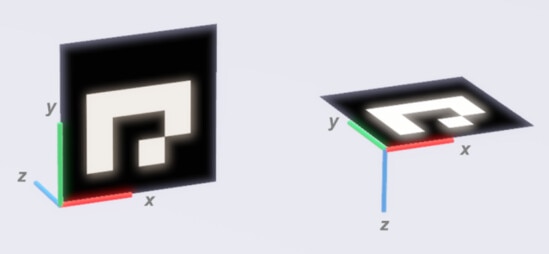
在下图中,锚点坐标系基于 ArUco 标记的位置和方向,并遵循左手法则。
-
使用标记位置、标记方向、标记 ID 和标记大小值修改 PLAYER01InCarOrg 。
一体机 string key = "PLAYER00InCarOrg=0.0,0.0,0.0,0.0,0.0,0.0,1.0,1,0.2";// Tx, Ty, Tz, qx, qy, qz, qw, marker id, marker size uint RETURN_SIZE = 256; IntPtr value = Marshal.AllocHGlobal(new IntPtr(RETURN_SIZE)); Interop.WVR_GetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key), value, RETURN_SIZE); string polling_value = Marshal.PtrToStringAnsi(value); Marshal.FreeCoTaskMem(value); if(string.Compare(polling_value, "InitMAErr") == 0) // initialization failed, should check config string { // write your error handling code here }PC VR string key = "PLAYER00InCarOrg="; string setting = "-0.4,0.9,-0.4,0.0,0.0,0.0,1.0,1,0.2"; // Tx,Ty,Tz,qx,qy,qz,qw,id,size key += setting; string result = SendRequestMessage(DeviceType.HMD, key); if (string.Compare(result, "InitMAErr") == 0) { // write your error handling code here } -
扫描标记。
一体机 // Start string key = "PLAYER00StartScan"; uint RETURN_SIZE = 256; IntPtr value = Marshal.AllocHGlobal(new IntPtr(RETURN_SIZE)); Interop.WVR_GetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key), value, RETURN_SIZE); Marshal.FreeCoTaskMem(value); // Stop string key = "PLAYER00StopScan"; uint RETURN_SIZE = 256; IntPtr value = Marshal.AllocHGlobal(new IntPtr(RETURN_SIZE)); Interop.WVR_GetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key), value, RETURN_SIZE); Mar
PC VR // Start string key = "PLAYER00StartScan"; SendRequestMessage(DeviceType.HMD, key); // Stop string key = "PLAYER00StopScan"; SendRequestMessage(DeviceType.HMD, key);
-
可选:检查扫描状态。
一体机 // Check scan string key = "PLAYER00CheckMA"; uint RETURN_SIZE = 256; IntPtr value = Marshal.AllocHGlobal(new IntPtr(RETURN_SIZE)); Interop.WVR_GetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobaltrToStringAnsi(value); Ansi(key), value, RETURN_SIZE); string polling_value = Marshal.PtrToStringAnsi(value); Marshal.FreeCoTaskMem(value); if (string.Compare(polling_value, "CTdone") == 0) // 2 markers scanned { //handling with 2nd marker scanned } else if (string.Compare(polling_value, "CTpass") == 0) // 1 marker scanned { //handling with first marker scanned }PC VR string key = "PLAYER00CheckMA"; string result = SendRequestMessage(DeviceType.HMD, key); if (string.Compare(result, "CTdone") == 0) { // handling with the second marker scanned } else if (string.Compare(result, "CTpass") == 0) { // handling with the first marker scanned } -
可选:使用低通滤波补偿机械振动。
您可以使用字符串键 PLAYER01PUM_HW_LPF_LEVEL 来最小化机械振动。指定 0 和 2 之间的过滤级别。请根据您的需要调整过滤级别。
一体机 string key = "PLAYER01PUM_HW_LPF_LEVEL=2"; Interop.WVR_SetParameters(WVR_DeviceType.WVR_DeviceType_HMD, Marshal.StringToHGlobalAnsi(key));
PC VR string key = " PLAYER01PUM_HW_LPF_LEVEL="; string setting = "2"; key += setting; string result = SendRequestMessage(DeviceType.Controller_Left, key);
此内容对您有帮助吗?
是
否
提交
谢谢!您的反馈可以帮助其他人了解最有用的信息。